Hengjiang Intelligent Technology Co., Ltd. เป็นผู้ผลิตและจําหน่ายระบบหุ่นยนต์อบและอุปกรณ์อัตโนมัติทางอุตสาหกรรมเกรดอาหารระดับมืออาชีพ กลุ่มผลิตภัณฑ์ของเราครอบคลุมหุ่นยนต์เดลต้าและ SCARA แบบสแตนด์อโลน เวิร์กสเตชันหุ่นยนต์ที่ยืดหยุ่น และระบบคัดแยกและบรรจุภัณฑ์แบบเต็มรูปแบบ ทั้งหมดนี้ออกแบบมาเพื่อการทํางานที่รวดเร็ว ความแม่นยําสูง และถูกสุขอนามัยในสภาพแวดล้อมการผลิตเบเกอรี่และอาหารแช่แข็งสมัยใหม่ ไม่ว่าคุณกําลังมองหาหุ่นยนต์ยูนิตเดียวเพื่อทําให้โหนดกระบวนการเดียวเป็นแบบอัตโนมัติหรือสายการผลิตแบบครบวงจรสําหรับการผลิตโดนัทพิซซ่าหรือทาร์ตไข่ Hengjiang นําเสนอโซลูชันแบบแยกส่วนที่ปรับขนาดได้ซึ่งช่วยลดต้นทุนแรงงานขจัดข้อผิดพลาดของมนุษย์และเพิ่มปริมาณงานเพื่อตอบสนองความต้องการของมาตรฐานโรงงานอัจฉริยะ
ตามประสบการณ์ผู้ผลิตหุ่นยนต์เดลต้า, Hengjiang ออกแบบและผลิตหุ่นยนต์แบบขนานซีรีส์ HJ-D11003-1 ตั้งแต่เริ่มต้น ครอบคลุมโครงสร้างทางกล เฟิร์มแวร์ควบคุมการเคลื่อนไหว และเครื่องมือเอ็นเอฟเฟกต์ หุ่นยนต์เดลต้าทํางานบนสถาปัตยกรรมจลนศาสตร์แบบขนาน: แขนที่ขับเคลื่อนอย่างอิสระสามแขนเชื่อมต่อกับเฟรมด้านบนแบบตายตัว และแอคทูเอเตอร์ข้อต่อทั้งหมดยังคงอยู่บนฐานที่อยู่กับที่แทนที่จะเคลื่อนที่ไปพร้อมกับชุดแขน สิ่งนี้ทําให้มวลเคลื่อนที่ต่ํามาก ซึ่งเป็นเหตุผลหลักที่หุ่นยนต์เดลต้าสามารถบรรลุอัตรารอบและความเร่งที่หุ่นยนต์แบบอนุกรมไม่สามารถเทียบได้
สถาปัตยกรรมทางเทคนิคของซีรีส์ HJ-D11003-1: ต้นแขนทั้งสามขับเคลื่อนด้วยเซอร์โวมอเตอร์ที่ติดตั้งเป็นศูนย์กลางบนแผ่นฐาน ลิงค์ล่างคาร์บอนไฟเบอร์หรืออลูมิเนียมส่งการเคลื่อนที่ไปยังแท่นเคลื่อนที่ตรงกลางผ่านข้อต่อบอลและซ็อกเก็ตช่วยขจัดฟันเฟือง ตัวแปรแกนไม่หมุนมาตรฐานจัดการกับการหยิบและวาง XYZ บริสุทธิ์ ในขณะที่ตัวแปรแกนหมุนจะเพิ่มแกนที่สี่ (แกน R) ที่เอ็นเอฟเฟกเตอร์ ทําให้สามารถแก้ไขการวางแนวระหว่างการหยิบ ซึ่งมีความสําคัญอย่างยิ่งเมื่อผลิตภัณฑ์มาถึงมุมสุ่มบนสายพานลําเลียงป้อนเข้า ความสามารถในการรับน้ําหนักกําหนดเป้าหมายผลิตภัณฑ์ที่มีน้ําหนักเบา (โดยทั่วไปต่ํากว่า 3 กก. ต่อหน่วย) โดยมีเส้นผ่านศูนย์กลางซองจดหมายทํางานโดยทั่วไปอยู่ในช่วง 800–1,100 มม. และระยะชักแนวตั้งสูงสุด 300 มม.
การรวมการควบคุมและการมองเห็น: หุ่นยนต์แต่ละตัวจับคู่กับตู้ขับเคลื่อนเซอร์โวและตัวควบคุมหุ่นยนต์เฉพาะที่ใช้ซอฟต์แวร์การวางแผนการเคลื่อนไหวของ Hengjiang แมชชีนวิชันได้รับการจัดการโดยกล้องอุตสาหกรรมที่ติดตั้งโคแอกเชียลเหนือสายพานลําเลียง ระบบวิชันซิสเต็มจะสตรีมข้อมูลตําแหน่งและมุมของผลิตภัณฑ์ไปยังคอนโทรลเลอร์แบบเรียลไทม์ ซึ่งจะคํานวณการกําหนดการหยิบหุ่นยนต์แต่ละตัวภายในคลัสเตอร์หุ่นยนต์หลายตัว โปรโตคอลการสื่อสารระหว่างโฮสต์การมองเห็นและตัวควบคุมหุ่นยนต์ใช้อีเทอร์เน็ตอุตสาหกรรมมาตรฐาน (EtherCAT หรือ Modbus TCP) ทําให้สามารถรวมเข้ากับระบบ SCADA ของบุคคลที่สามได้โดยไม่ต้องใช้มิดเดิลแวร์เพิ่มเติม
ข้อควรพิจารณาในการออกแบบที่ถูกสุขอนามัย: พื้นผิวทั้งหมดที่สัมผัสกับโซนอาหารใช้ตัวยึดสแตนเลส 304 หรือ 316 และตัวเรือนโพลีเมอร์ที่ปลอดภัยต่ออาหาร เปลือกหุ้มมอเตอร์ระดับ IP65 ป้องกันไอน้ําและน้ําที่ชะล้าง การจัดการสายเคเบิลเดินสายไฟผ่านช่องท่อร้อยสายที่ปิดสนิท ช่วยขจัดพื้นผิวแนวนอนที่เศษขยะอาจสะสมได้
ผลิตภัณฑ์ที่เกี่ยวข้อง: โดนัท, เกี๊ยว, ซาลาเปา, ครัวซองต์, ทาร์ตไข่, ชิ้นช็อคโกแลต และขนมอบหรือแช่แข็งขึ้นรูปหรือขึ้นรูปอื่นๆ HJ-D11003-1 มีให้เลือกทั้งแบบไม่หมุนและแบบแกนหมุน ดูหน้ารายละเอียดของแต่ละรุ่นสําหรับพารามิเตอร์จลนศาสตร์ ซองจดหมายการเข้าถึง และการให้คะแนนน้ําหนักบรรทุกที่แน่นอน
สําหรับบริษัทที่ประเมินผู้ผลิตหุ่นยนต์เดลต้าทั่วโลก Hengjiang เสนอการทดสอบการยอมรับจากโรงงาน (FAT) การสนับสนุนการว่าจ้างระยะไกล และความร่วมมือ OEM/ODM วิดีโออ้างอิงการสาธิตหุ่นยนต์เดลต้าในสายการคัดแยกโดนัทและพิซซ่าสดมีอยู่ในห้องสมุดวิดีโอหุ่นยนต์อบ.
ความเข้าใจราคาหุ่นยนต์ SCARAปัจจัยเป็นสิ่งสําคัญก่อนที่จะตกลงโครงการระบบอัตโนมัติ หุ่นยนต์ SCARA ของ Hengjiang (Selective Compliance Assembly Robot Arm) ได้รับการพัฒนาและผลิตอย่างอิสระ ซึ่งหมายความว่าการกําหนดราคาสะท้อนถึงมูลค่าทางวิศวกรรมที่แท้จริงมากกว่ามาร์กอัปของผู้จัดจําหน่าย กลุ่มผลิตภัณฑ์ปัจจุบันประกอบด้วยสี่รุ่น ได้แก่ HJ-SC1250-R, HJ-SC1050-R, HJ-SCD0625A และ HJ-SCD7840 ซึ่งแตกต่างจากระยะเอื้อมแขน (625 มม. ถึง 1,250 มม.) น้ําหนักบรรทุก (5 กก. ถึง 30 กก.) และระยะชักแกน Z
อะไรเป็นตัวกําหนดราคาหุ่นยนต์ SCARA? ปัจจัยหลักห้าประการควบคุมต้นทุนสุดท้ายของระบบ SCARA เกรดอาหาร:
ระยะเอื้อมแขนและระดับน้ําหนักบรรทุก: ระยะยืดที่ยาวขึ้นและน้ําหนักบรรทุกที่สูงขึ้นต้องใช้ส่วนประกอบโครงสร้างที่หนักกว่าและเซอร์โวไดรฟ์ที่ใหญ่ขึ้น ซึ่งจะเพิ่มต้นทุนต่อหน่วยโดยตรง ตัวอย่างเช่น HJ-SC1250-R ครอบคลุมระยะยืด 1,250 มม. พร้อมน้ําหนักบรรทุก 30 กก. เหมาะสําหรับการจัดการชั้นพาเลท ในขณะที่ HJ-SCD0625A กําหนดเป้าหมายการคัดแยกที่แม่นยําที่ระยะยืด 625 มม. ด้วยซองน้ําหนักบรรทุกที่เบากว่าและระดับราคาที่ต่ํากว่าตามลําดับ
จํานวนแกน: หุ่นยนต์ SCARA มาตรฐานทํางานบนสี่แกน (การหมุน J1, การหมุน J2, เชิงเส้น Z, การหมุนข้อมือ R) การกําหนดค่าบางอย่างเพิ่มแกนที่ห้าสําหรับงานการวางแนวที่ซับซ้อน แกนเพิ่มเติมเพิ่มจํานวนเซอร์โวและความซับซ้อนของคอนโทรลเลอร์ ซึ่งส่งผลต่อราคา
การรวมระบบการมองเห็น: หน่วยหุ่นยนต์แบบสแตนด์อโลนที่เสนอราคาโดยไม่มีระบบการมองเห็นแสดงถึงราคาพื้นฐาน เมื่อมาพร้อมกับโมดูลแมชชีนวิชันในตัวของ Hengjiang — กล้องอุตสาหกรรมความละเอียดสูง, ไฟวงแหวน LED, หน่วยประมวลผลภาพแบบเรียลไทม์ และซอฟต์แวร์การปรับเทียบ — ราคาของระบบจะเพิ่มขึ้น แต่มอบโซลูชันแบบเบ็ดเสร็จที่พร้อมสําหรับการใช้งานทันที
การกําหนดค่าการติดตั้ง: ซีรีส์ HJ รองรับการติดตั้งแบบติดเพดาน (คว่ํา) เป็นมาตรฐาน ซึ่งช่วยปรับพื้นที่ใช้จ่ายให้เหมาะสมและปรับปรุงการเข้าถึงสําหรับการทําความสะอาด โครงขาตั้งพื้นแบบกําหนดเองหรือตัวยึดโครงสําหรับตั้งสิ่งของสําหรับเลย์เอาต์พิเศษมีค่าใช้จ่ายด้านวิศวกรรมและการผลิตเพิ่มเติม
ใบอนุญาตระบบควบคุมและซอฟต์แวร์: ตู้ควบคุมไดรฟ์แบบบูรณาการของ Hengjiang รวมเซอร์โวแอมพลิฟายเออร์ ตัวควบคุมการเคลื่อนไหวของหุ่นยนต์ รีเลย์นิรภัย และหน้าจอสัมผัส HMI ไว้ในกล่องเดียว แพลตฟอร์มซอฟต์แวร์ที่พัฒนาขึ้นเองรองรับการตรวจสอบระยะไกล การอัปเดตเฟิร์มแวร์แบบ over-the-air และการจัดการสูตรอาหารสําหรับสายผลิตภัณฑ์หลายรายการ ทั้งหมดนี้รวมอยู่ในแพ็คเกจมาตรฐาน
ข้อมูลจําเพาะทางเทคนิคที่สําคัญของ SCARA: ความแม่นยําในการวางตําแหน่งซ้ําคือ ±0.025 มม. ในทั้งสี่แกน ซึ่งผ่านการทดสอบความทนทาน 100,000 รอบ ความเร็วเชิงเส้นสูงสุดของเอ็นเอฟเฟกต์ถึง 2 ม./วินาที ตัวหุ่นยนต์ทั้งหมดมีน้ําหนักประมาณ 40 กก. ทําให้ข้อกําหนดด้านโครงสร้างเหนือศีรษะง่ายขึ้น ข้อต่อทั้งหมดถูกปิดผนึกอย่างน้อย IP54 โดยมี IP65 สําหรับสภาพแวดล้อมการชะล้าง
สําหรับราคาโดยละเอียดของแต่ละรุ่นและการกําหนดค่า โปรดติดต่อทีมขายของ Hengjiang ผ่านทางสอบถามออนไลน์หน้า
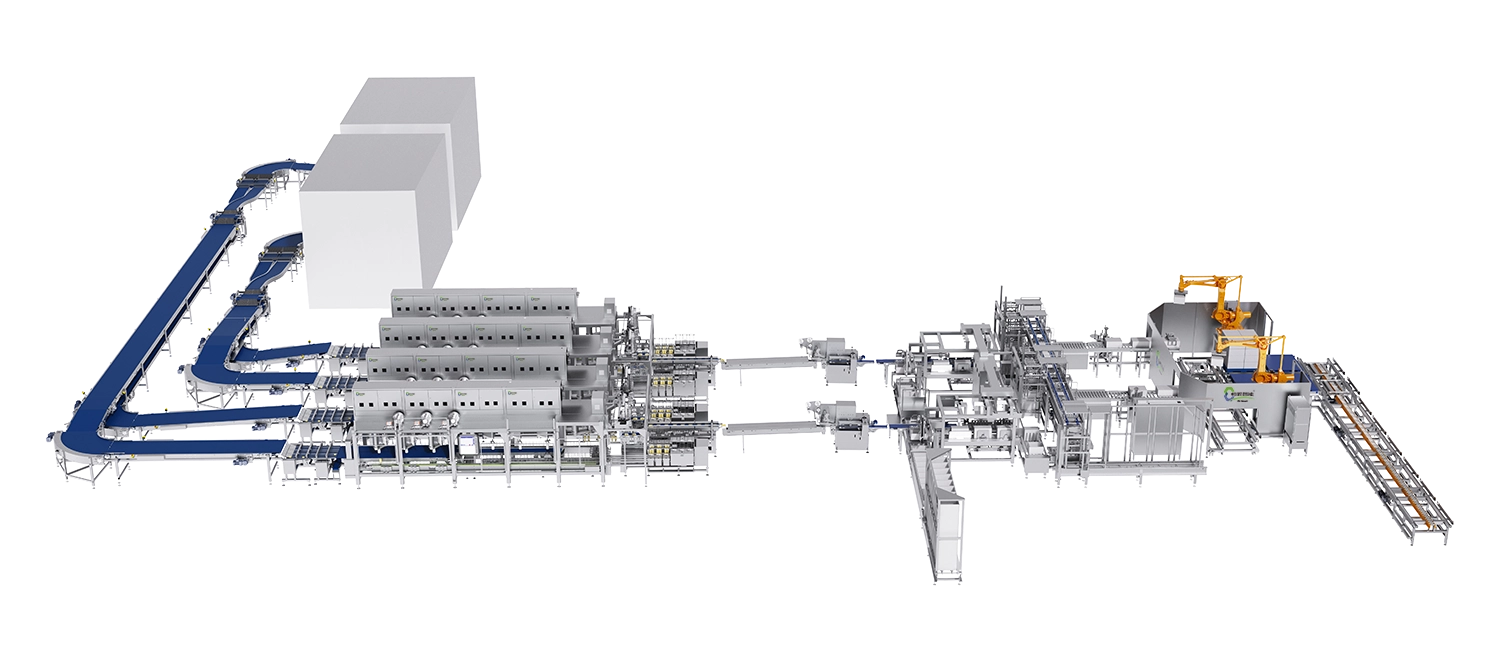
พื้นที่เวิร์กสเตชันหุ่นยนต์ SCARAจาก Hengjiang เป็นเซลล์อัตโนมัติที่ออกแบบไว้ล่วงหน้าซึ่งรวมหุ่นยนต์ SCARA เกรดอาหาร, แมชชีนวิชัน, สายพานลําเลียงป้อนเข้าและป้อนออก, โครงสแตนเลส, การป้องกันความปลอดภัยและตู้ควบคุมแบบรวมเป็นหน่วยเดียวที่ปรับใช้ได้ การผสานรวมระดับเวิร์กสเตชันนี้ช่วยลดเวลาด้านวิศวกรรมในสถานที่ได้อย่างมีนัยสําคัญเมื่อเทียบกับการซื้อส่วนประกอบแต่ละชิ้นและรวมเข้าด้วยกันอย่างอิสระ
สถาปัตยกรรมเวิร์กสเตชันหลัก: เค้าโครงเซลล์วางตําแหน่งหุ่นยนต์ SCARA ไว้ตรงกลางเหนือสายพานลําเลียงป้อนเข้า สถานีวิชันที่ต้นน้ําของซองจดหมายทํางานของหุ่นยนต์จะจับภาพของผลิตภัณฑ์ที่เข้ามาแต่ละชิ้น พิกัดที่ประมวลผลจะถูกส่งต่อไปยังตัวควบคุมหุ่นยนต์ผ่าน EtherCAT ภายในเวลาแฝง 20 มิลลิวินาที เพื่อให้มั่นใจว่าหุ่นยนต์จะได้รับข้อมูลการหยิบที่แม่นยําก่อนที่ผลิตภัณฑ์จะไปถึงโซนหยิบสินค้า สายพานลําเลียงป้อนออกด้านใดด้านหนึ่งหรือทั้งสองด้านจะนําผลิตภัณฑ์ที่คัดแยกไปยังสถานีบรรจุหีบห่อปลายน้ําหรือสถานีโหลดถาด
แอปพลิเคชั่นเรือธงที่สาธิตที่ Hengjiang คือเวิร์กสเตชันการคัดแยกและซ้อนเปลือกทาร์ตไข่แช่แข็ง ในการกําหนดค่านี้ เปลือกทาร์ตไข่แช่แข็งที่เพิ่งขึ้นรูปใหม่จะมาถึงสายพานป้อนเข้าในทิศทางแบบสุ่ม ระบบการมองเห็นจะระบุตําแหน่งกึ่งกลางและมุมการวางแนวของกระสุนแต่ละนัด หุ่นยนต์ SCARA จะหยิบเปลือกหอยแต่ละชิ้นและวางลงในตําแหน่งกองที่กําหนดด้วยความสามารถในการทําซ้ํา ±0.02 มม. สร้างกองที่สม่ําเสมอของจํานวนที่กําหนดไว้ล่วงหน้า ซึ่งจะถูกถ่ายโอนไปยังสถานีบรรจุภัณฑ์ เซลล์มีอัตราปริมาณงานที่เกินกว่าที่ผู้ปฏิบัติงานแบบแมนนวลสามถึงสี่คนสามารถผลิตได้โดยไม่มีการปนเปื้อนจากการสัมผัสกับมนุษย์
รายละเอียดการก่อสร้างที่ถูกสุขอนามัย: โครงเวิร์กสเตชันเชื่อมสแตนเลส 304 อย่างเต็มที่พร้อมพื้นผิวขัดเงาด้วยไฟฟ้า สายพานลําเลียงใช้วัสดุ PU เกรดอาหาร ส่วนประกอบนิวเมติกทั้งหมดสําหรับกริปเปอร์เอ็นเอฟเฟกต์ติดตั้งอยู่ภายในตัวเรือนแขนหุ่นยนต์ที่ปิดสนิท ตู้ไฟฟ้าติดตั้งนอกโซนอาหารเพื่อป้องกันความร้อนและการรบกวนทางแม่เหล็กไฟฟ้าที่ส่งผลต่อคุณภาพของผลิตภัณฑ์
ความสามารถในการปรับขนาด: เวิร์กสเตชัน SCARA เดียวสามารถทํางานแบบสแตนด์อโลนหรือเชื่อมต่อเครือข่ายเป็นขนาดใหญ่หุ่นยนต์คัดแยก SCARA สายการบรรจุซึ่งรวมถึงการโหลดถาดอัตโนมัติ การบรรจุกล่อง และการบรรจุกล่อง สถาปัตยกรรมการสื่อสารแบบแยกส่วน (เข้ากันได้กับ OPC-UA) ช่วยให้เวิร์กสเตชันสามารถรายงานข้อมูลการผลิต — จํานวนรอบ อัตราการปฏิเสธ การวัดและส่งข้อมูลทางไกลของแรงกริปเปอร์ — ไปยังระบบ MES หรือ ERP ส่วนกลาง
เวิร์กสเตชันนี้ยังเป็นเส้นทางการผสานรวมระดับเริ่มต้นสําหรับผู้ผลิตที่ต้องการทําให้ขั้นตอนกระบวนการหนึ่งขั้นตอนเป็นไปโดยอัตโนมัติก่อนที่จะตัดสินใจใช้โซลูชันแบบเต็มรูปแบบ ดูบริการและการสนับสนุนส่วนสําหรับการติดตั้ง การทดสอบการยอมรับ และรายละเอียดการฝึกอบรมผู้ปฏิบัติงาน
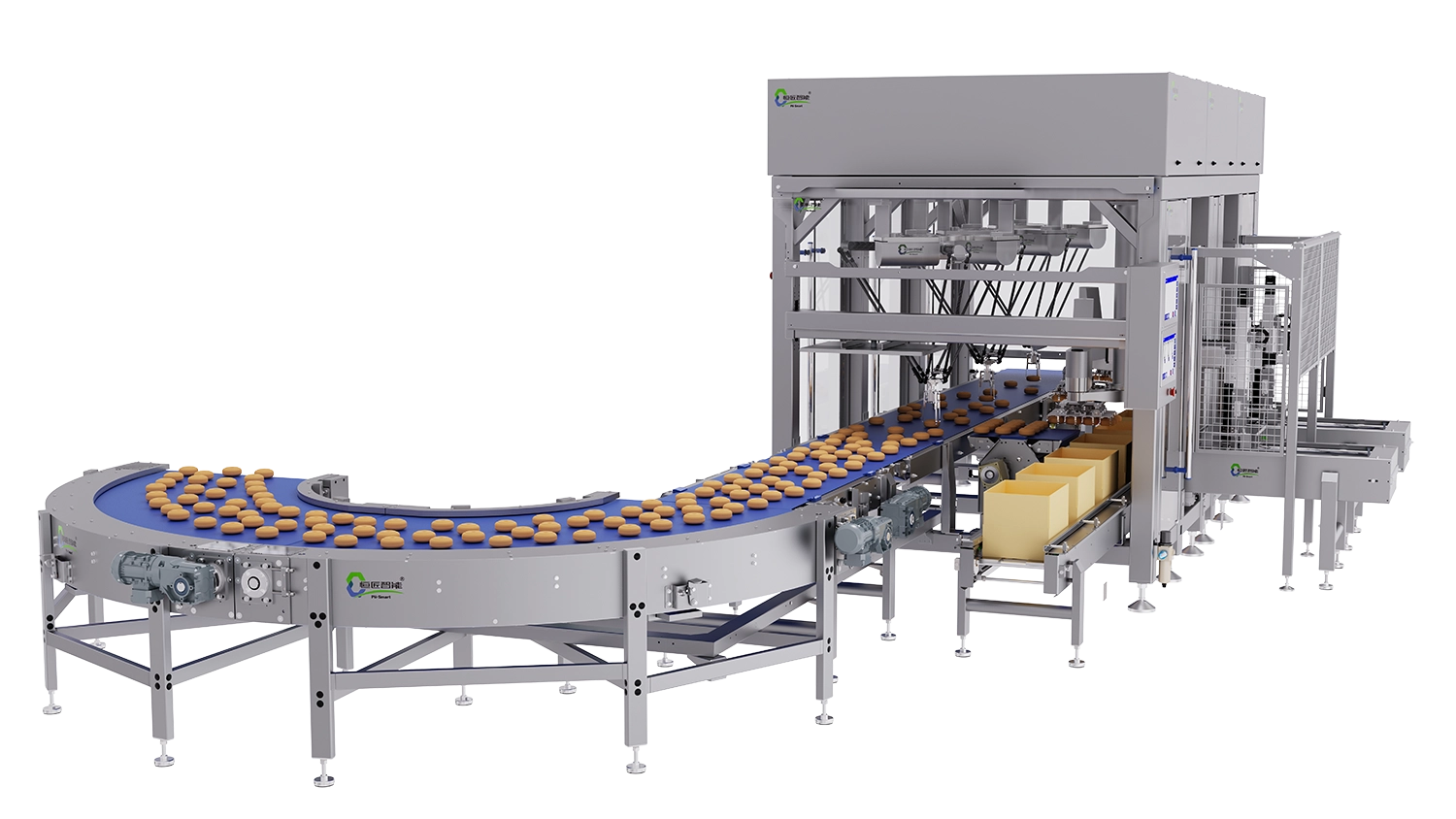
พื้นที่เวิร์กสเตชันหุ่นยนต์เดลต้าจาก Hengjiang กําหนดค่าหุ่นยนต์เดลต้า HJ-D11003-1 อย่างน้อยหนึ่งตัวเหนือสายพานลําเลียงที่ใช้ร่วมกัน พร้อมระบบการมองเห็นแบบครบวงจรที่จัดการการมอบหมายการหยิบสินค้าในหุ่นยนต์ทั้งหมดในคลัสเตอร์ สถาปัตยกรรมหุ่นยนต์หลายตัวนี้เป็นแนวทางมาตรฐานอุตสาหกรรมเพื่อให้ได้ปริมาณงานที่สูงมากในสายป้อนเข้าที่เคลื่อนที่เร็ว ซึ่งหุ่นยนต์ตัวเดียวจะเป็นคอขวด
เวิร์กสเตชันเดลต้ายูนิตเดียว: HJ-D11003-1 ตัวเดียวที่ติดตั้งเหนือสายพานกว้าง 500–800 มม. จับผลิตภัณฑ์ที่มาถึงในอัตราสูงสุดประมาณ 60–80 หยิบต่อนาที ขึ้นอยู่กับรูปทรงของผลิตภัณฑ์และรอบเวลาของกริปเปอร์ ระบบการมองเห็นจะส่องสว่างสายพานด้วยอาร์เรย์ LED ที่มีโครงสร้าง จับภาพด้วยอัตราทริกเกอร์ที่ตั้งโปรแกรมไว้ และส่งออกตําแหน่ง XY พร้อมข้อมูลมุมสําหรับผลิตภัณฑ์ที่ตรวจพบแต่ละรายการ ตัวควบคุมหุ่นยนต์จะรักษาคิวของการหยิบที่รอดําเนินการ โดยดําเนินการตามลําดับที่ลดระยะการเดินทางของแขน (การตั้งเวลาเพื่อนบ้านที่ใกล้ที่สุด) ซึ่งเพิ่มปริมาณงานที่มีประสิทธิภาพสูงสุด
คลัสเตอร์เดลต้าหลายหน่วย: เมื่อความเร็วของสายการผลิตหรือความหนาแน่นของผลิตภัณฑ์เกินความจุของหุ่นยนต์ตัวเดียว หุ่นยนต์เดลต้าสอง สามตัว หรือมากกว่าจะถูกจัดเรียงเป็นอนุกรมตามทิศทางของสายพานลําเลียง โฮสต์การมองเห็นที่ใช้ร่วมกันจะกําหนดผลิตภัณฑ์ที่เข้ามาแต่ละรายการให้กับหุ่นยนต์เฉพาะตามโซนตําแหน่งและความพร้อมใช้งานของหุ่นยนต์ (โหลดบาลานซ์) หากหุ่นยนต์ตัวหนึ่งถูกครอบครองในการเลือกครั้งก่อน การจัดตารางเวลาแบบร่วมมือนี้ช่วยให้มั่นใจได้ว่าไม่มีผลิตภัณฑ์ใดออกจากโซนหยิบสินค้าโดยไม่มีการจัดการภายใต้สภาวะการทํางานปกติ
แอปพลิเคชั่นคัดแยกโดนัท: ในแอปพลิเคชัน Donut Robot Sorting Workstation Hengjiang ปรับใช้คลัสเตอร์เดลต้าหุ่นยนต์หลายตัวเพื่อจัดเรียงโดนัทที่ทอดสดใหม่หรือแช่แข็งตามขนาด รูปร่าง และระยะห่างลงในถาดหรือแม่พิมพ์บรรจุภัณฑ์ โมดูลตรวจจับข้อบกพร่องของระบบการมองเห็นจะตรวจสอบโดนัทที่ชํารุดหรือผิดรูปพร้อมกัน เซลล์ทั้งหมดเชื่อมต่อโดยตรงกับ Hengjiangสายการผลิตโดนัทขึ้นรูปต้นน้ําสร้างการไหลอัตโนมัติอย่างต่อเนื่องตั้งแต่การขึ้นรูปแป้งไปจนถึงการคัดแยกและการบรรจุหีบห่อ
ตัวเลือกเครื่องมือเอ็นเอฟเฟกต์: Hengjiang จัดหากริปเปอร์ที่เป็นกรรมสิทธิ์ซึ่งตรงกับผลิตภัณฑ์เบเกอรี่ทั่วไป — ถ้วยดูดสูญญากาศในซิลิโคนเกรดอาหารสําหรับผลิตภัณฑ์ที่มีพื้นผิวเรียบ ระบบเปลี่ยนเร็วของเอ็นเอฟเฟกต์ช่วยให้ผู้ปฏิบัติงานสามารถเปลี่ยนประเภทผลิตภัณฑ์ได้ภายในเวลาไม่ถึงสองนาทีโดยไม่ต้องใช้เครื่องมือ
ความปลอดภัยและการปฏิบัติตามข้อกําหนด: เวิร์กสเตชันแต่ละแห่งมีม่านปรับแสงบนจุดเชื่อมต่อของผู้ปฏิบัติงานทั้งหมด วงจรหยุดฉุกเฉิน และโมดูลรีเลย์ที่ได้รับการจัดอันดับความปลอดภัยที่สอดคล้องกับ ISO 13849 PLd ซอฟต์แวร์ควบคุมบังคับใช้ขีดจํากัดความเร็วและแรงเมื่อม่านแสงนิรภัยถูกปิดกั้นบางส่วน (โหมดลดความเร็ว) แทนที่จะทําการหยุดอย่างหนัก เพื่อลดการหยุดชะงักของการผลิตระหว่างการเข้าใช้งานสั้นๆ
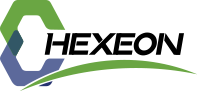
พื้นที่หุ่นยนต์คัดแยก SCARA สายการบรรจุจาก Hengjiang เป็นระบบการผลิตที่สมบูรณ์ซึ่งนําผลิตภัณฑ์อาหารที่ไม่ได้คัดแยกมาที่ทางเข้าและส่งมอบกล่องหรือถาดที่ปิดสนิทและปิดสนิทที่ทางออกโดยไม่มีการแทรกแซงด้วยตนเองระหว่างสองจุดนี้ โซลูชันระดับสายการผลิตนี้แสดงถึงการผสานรวมในระดับสูงสุดในกลุ่มผลิตภัณฑ์หุ่นยนต์ของ Hengjiang และออกแบบมาสําหรับผู้ผลิตที่ใช้ SKU ปริมาณมากโดยมีข้อกําหนดความสม่ําเสมอของเอาต์พุตที่เข้มงวด
สถาปัตยกรรมระบบ: สายการผลิตประกอบด้วยโซนการทํางานหกโซนที่จัดเรียงในรูปแบบเชิงเส้นหรือรูปตัว L เพื่อให้เหมาะกับพื้นที่โรงงานที่มีอยู่ โซน 1 คือบัฟเฟอร์ป้อนเข้า ซึ่งผลิตภัณฑ์จากกระบวนการอบหรือแช่แข็งต้นน้ําจะถูกส่งไปยังสายพานลําเลียงที่กระจายตัวออกเป็นชั้นเดียวสําหรับการตรวจสอบด้วยภาพ โซน 2 เป็นสถานีตรวจสอบด้วยภาพ ซึ่งทําการตรวจสอบผลิตภัณฑ์ 100% สําหรับขนาด รูปร่าง ความสม่ําเสมอของสี และข้อบกพร่องของพื้นผิว โซน 3 คือโซนหยิบหุ่นยนต์ SCARA ซึ่งหุ่นยนต์ SCARA หนึ่งหรือสองตัวทําการหยิบและวางผลิตภัณฑ์ที่ยอมรับลงในถาดหรือแม่พิมพ์บรรจุภัณฑ์ที่วางอยู่บนสายพานลําเลียงจัดทําดัชนีแบบขนาน โซน 4 จัดการการตรวจสอบการเติมถาดผ่านเครื่องชั่งตรวจสอบน้ําหนักที่รวมอยู่ในการป้อนออกของโซนหุ่นยนต์ โซน 5 เป็นโมดูลฝาถาดหรือกล่องอัตโนมัติ ซึ่งใช้ฝาฟิล์มหรือกระดาษและปิดผนึกขอบถาด โซน 6 เป็นโมดูลการบรรจุกล่องและการจัดเรียงพาเลท ซึ่งจัดกลุ่มถาดที่ปิดสนิทลงในกล่องจัดส่งและวางซ้อนกันบนพาเลท
ใบสมัคร: สายการผลิตการคัดแยกเปลือกทาร์ตไข่แช่แข็งและบรรจุภัณฑ์ เปลือกทาร์ตไข่แช่แข็งที่ผ่านการขึ้นรูปเข้าสู่สายการผลิตที่โซน 1 ในอัตราสูงถึง 200 ชิ้นต่อนาที ระบบการมองเห็นที่โซน 2 จะระบุและปฏิเสธเปลือกที่แตกหักหรือผิดรูป (โดยทั่วไปจะน้อยกว่า 2% ของผลผลิตในสายการขึ้นรูปที่ได้รับการบํารุงรักษาอย่างดี) หุ่นยนต์ SCARA ที่โซน 3 วางเปลือกหอยที่ยอมรับลงในถาดพลาสติก 6 ช่องหรือ 12 ช่องที่จัดทําดัชนีบนสายพานลําเลียงแบบขนานด้วยความแม่นยําในการวางตําแหน่งถาด ±0.5 มม. สายการผลิตที่เสร็จสมบูรณ์ส่งมอบถาดที่ปิดสนิทและติดฉลากพร้อมสําหรับการกระจายห่วงโซ่ความเย็น ดูต้นน้ําสายการผลิตทาร์ตไข่สไตล์ฮ่องกงสําหรับบริบทเกี่ยวกับวิธีการผลิตเปลือกหอยที่ขึ้นรูปก่อนที่จะเข้าสู่ระบบการคัดแยกและบรรจุภัณฑ์นี้
การรวมการควบคุม: สายการผลิตทั้งหมดทํางานบน PLC ควบคุมเครื่องเดียวพร้อม HMI หน้าจอสัมผัสขนาด 21 นิ้ว ตัวควบคุมย่อยของแต่ละโซนสื่อสารกับ PLC ควบคุมผ่าน PROFINET ผู้ปฏิบัติงานสามารถตรวจสอบปริมาณงานแบบโซนต่อโซน ประวัติการเตือน อัตราการปฏิเสธ และตัวชี้วัด OEE (ประสิทธิภาพของอุปกรณ์โดยรวม) ได้แบบเรียลไทม์ ระบบรองรับการจัดเก็บสูตรอาหารสําหรับ SKU ของผลิตภัณฑ์หลายรายการ การเปลี่ยนระหว่าง SKU ต้องใช้เพียงการเลือกสูตรบน HMI รวมถึงการเปลี่ยนรูปแบบเอ็นเอฟเฟกต์และถาดทางกายภาพ ซึ่งสามารถทําได้ภายใน 15 นาที
รอยเท้าและสาธารณูปโภค: สายการผลิตเปลือกทาร์ตไข่มีความยาวประมาณ 15-20 ม. และกว้าง 3-4 ม. ความต้องการพลังงานคือ 380V สามเฟส 50 Hz โดยทั่วไป 15–25 กิโลวัตต์โหลดที่เชื่อมต่อทั้งหมด ต้องใช้อากาศอัดที่ 0.6 MPa สําหรับการสั่งงานกริปเปอร์และการจับยึดถาดลม การเชื่อมต่อน้ําสําหรับ CIP (Clean-In-Place) เป็นทางเลือกขึ้นอยู่กับการจําแนกโซนที่ถูกสุขอนามัยของโรงงาน
สายการบรรจุคัดแยกโดนัทอัตโนมัติที่ Hengjiang รวมหุ่นยนต์ SCARA และเดลต้าเข้าด้วยกันในรูปแบบที่ประสานกันซึ่งปรับให้เหมาะกับลักษณะทางกายภาพของโดนัทโดยเฉพาะ — รูปทรงกลมหรือวงรี พื้นผิวที่เปลี่ยนรูปได้นุ่ม พื้นผิวกระจกที่หลากหลาย และความเร็วสายการผลิตสูงจากหม้อทอดหรือเครื่องพิสูจน์อักษรความจุสูง บรรทัดนี้บันทึกไว้ในการใช้หุ่นยนต์ SCARA และเดลต้าร่วมกันส่วนของพอร์ตโฟลิโอเวิร์กสเตชันแบบบูรณาการของ Hengjiang
เหตุใดโดนัทจึงต้องใช้สายการผลิตเฉพาะทาง: โดนัทนําเสนอความท้าทายในการจัดการที่ไม่เหมือนใคร พื้นผิวที่นุ่มและเหนียวทําให้การเลือกถ้วยสูญญากาศมีความสําคัญ — การดูดมากเกินไปจะทําให้ผลิตภัณฑ์เสียรูปทรง น้อยเกินไปทําให้เกิดการลดลง รูปทรงเรขาคณิตแบบวงกลมหมายความว่าการควบคุมการวางแนวมีความสําคัญน้อยกว่าผลิตภัณฑ์ที่มีทิศทาง แต่ระยะห่างที่สม่ําเสมอในถาดบรรจุภัณฑ์เป็นสิ่งสําคัญสําหรับการนําเสนอ สายการผลิตโดนัทปริมาณมาก (หม้อทอดอุตสาหกรรมที่ผลิต 3,000-6,000 ชิ้นต่อชั่วโมง) ต้องการคลัสเตอร์หุ่นยนต์ที่สามารถทํางานได้อย่างต่อเนื่องโดยไม่ลดประสิทธิภาพที่เกี่ยวข้องกับความล้าในการทํางานหลายกะ
การกําหนดค่าสายการผลิตสําหรับโดนัท: หุ่นยนต์เดลต้าจัดการงานหยิบและวางความเร็วสูงหลักจากสายพานลําเลียงป้อนออกของหม้อทอดไปยังถาดกลาง อัตรารอบ 60-100 หยิบต่อนาทีต่อหน่วย รวมกันในคลัสเตอร์หุ่นยนต์สามหรือสี่ตัว ตรงกับอัตราผลผลิตของหม้อทอดอุตสาหกรรม จากนั้นหุ่นยนต์ SCARA จะจัดการงานรอง: หยิบโดนัทที่คัดแยกไว้ล่วงหน้าจากถาดกลางและวางลงในบรรจุภัณฑ์ขายปลีกด้วยการวางแนวที่แม่นยํา การแบ่งงานนี้สอดคล้องกับจุดแข็งของหุ่นยนต์แต่ละประเภท — เดลต้าสําหรับความเร็วดิบ SCARA สําหรับการจัดวางที่แม่นยําและน้ําหนักบรรทุกที่หนักกว่า
ความเข้ากันได้ของกระจก: เครื่องมือเอ็นเอฟเฟกต์ในกลุ่มผลิตภัณฑ์โดนัทได้รับการออกแบบทางวิศวกรรมสําหรับพื้นผิวเคลือบ เคลือบน้ําตาล และพื้นผิวเรียบ ถ้วยดูดซิลิโคนพร้อมตัวควบคุมสุญญากาศแบบปรับได้จะชดเชยความแปรปรวนของพื้นผิว อัลกอริธึมการสะท้อนแสง-การทําให้เป็นมาตรฐานของระบบการมองเห็นจะจัดการกับความแปรผันของคอนทราสต์ระหว่างกระจกด้านและกระจกมันโดยไม่ต้องมีการสอบเทียบแยกต่างหากตามตัวแปรของผลิตภัณฑ์
บูรณาการกับสายการขึ้นรูป: สายการบรรจุนี้เชื่อมต่อโดยตรงกับ Hengjiangสายการผลิตโดนัทขึ้นรูปสร้างห่วงโซ่การผลิตสู่บรรจุภัณฑ์ที่ต่อเนื่อง Hengjiang เสนอการส่งมอบโครงการแบบเบ็ดเสร็จซึ่งครอบคลุมทั้งสายการขึ้นรูปและสายการคัดแยกและบรรจุภัณฑ์ภายใต้สัญญาเดียว พร้อมการฝึกอบรมการว่าจ้างและผู้ปฏิบัติงานแบบครบวงจร
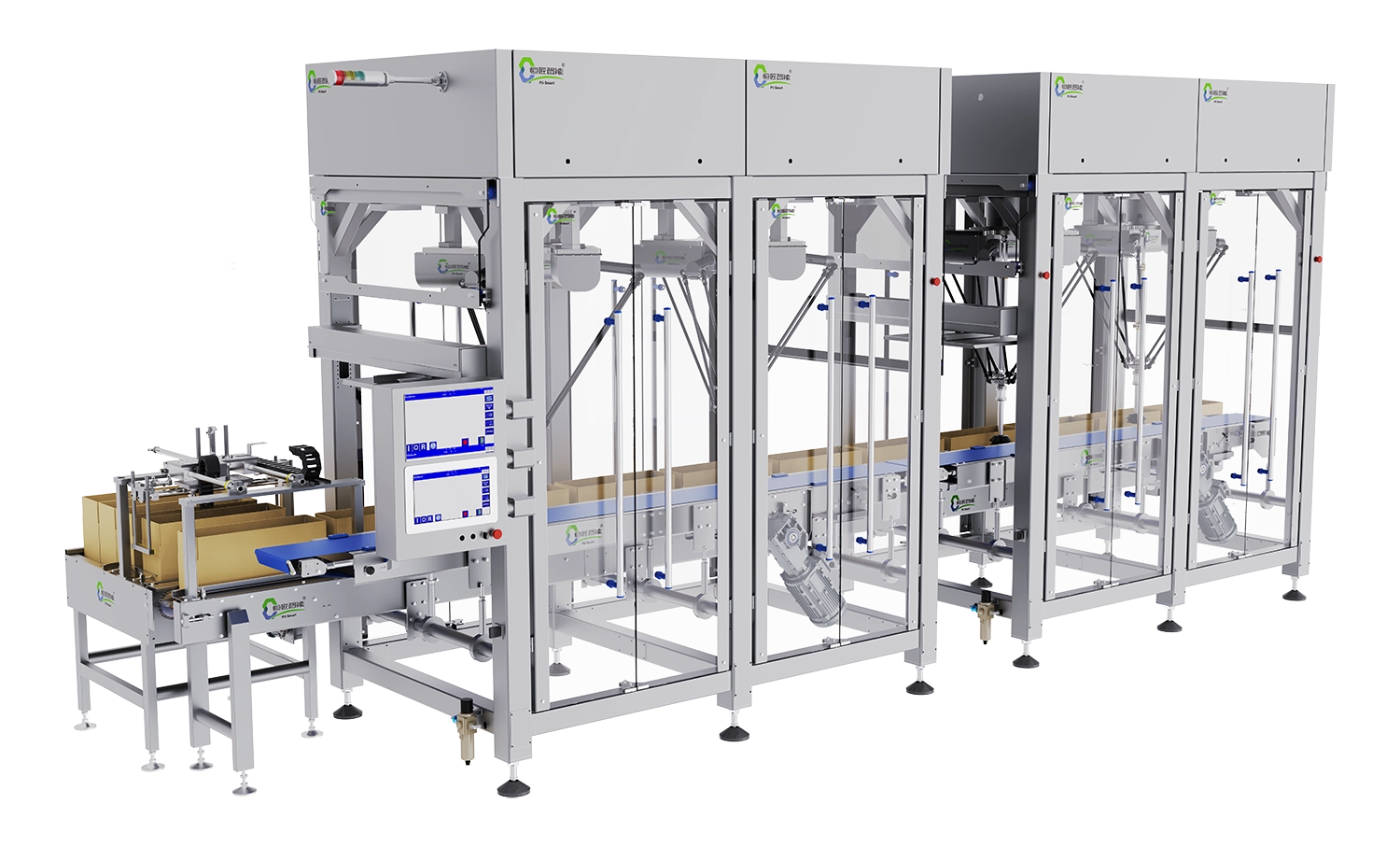
พื้นที่สายการบรรจุคัดแยกพิซซ่าอัตโนมัติที่ Hengjiang ใช้หุ่นยนต์เดลต้าแบบสองหน่วยหรือหลายหน่วยเพื่อจัดการกับการคัดแยกและบรรจุภัณฑ์พิซซ่าแช่แข็ง เพื่อจัดการกับความท้าทายเฉพาะของผลิตภัณฑ์อาหารที่มีเส้นผ่านศูนย์กลางขนาดใหญ่และแบนซึ่งต้องใส่ลงในกล่องด้วยความแม่นยําระดับมิลลิเมตร
ความท้าทายในการจัดการพิซซ่าเฉพาะ: พิซซ่าแช่แข็งมีขนาดใหญ่ (โดยทั่วไปมีเส้นผ่านศูนย์กลาง 200-350 มม.) ค่อนข้างหนักเมื่อเทียบกับโดนัทหรือขนมอบ (200-500 กรัมต่อหน่วย) และต้องใส่ลงในปลอกกล่องที่มีความทนทานสูงโดยไม่ทําให้ขอบเสียหายต่อชั้นท็อปปิ้งหรือเปลือกโลก ขนาดด้านในของกล่องบรรจุภัณฑ์มีระยะห่างเพียง 3-5 มม. ในแต่ละด้าน ซึ่งหมายความว่าความแม่นยําในการจัดวางและความสามารถในการทําซ้ําของหุ่นยนต์จะต้องเข้มงวดกว่าค่าความคลาดเคลื่อนของระยะห่าง HJ-D11003-1 ของ Hengjiang พร้อมแกนหมุนให้ความสามารถในการทําซ้ําตําแหน่ง ±0.5 มม. ในระนาบ XY ที่ความเร็วในการทํางานเต็มที่ ซึ่งอยู่ในเกณฑ์ความคลาดเคลื่อนที่จําเป็นสําหรับรูปแบบกล่องพิซซ่ามาตรฐาน
การกําหนดค่าเดลต้าแบบสองหน่วยและหลายหน่วย: สายการผลิตพิซซ่าที่บันทึกไว้ในพอร์ตโฟลิโอของ Hengjiang ได้แก่ สายการคัดแยกและบรรจุภัณฑ์พิซซ่า A และสายการคัดแยกพิซซ่าและบรรจุภัณฑ์ B ซึ่งแสดงถึงระดับปริมาณงานและการกําหนดค่าเค้าโครงที่แตกต่างกัน สายการผลิต A ใช้คลัสเตอร์เดลต้าหุ่นยนต์สองตัวสําหรับสายการผลิตขนาดกลาง (800–1,500 พิซซ่าต่อชั่วโมง) สายการผลิต B ใช้คลัสเตอร์หุ่นยนต์สามหรือสี่ตัวสําหรับสายการผลิตความจุสูงที่ตรงกับผลผลิตของเตาอบบนดาดฟ้าอุตสาหกรรมหรือระบบอบในอุโมงค์ ทั้งสองสายใช้สถาปัตยกรรมการมองเห็นและการควบคุมเดียวกัน ซึ่งแตกต่างกันเฉพาะจํานวนหุ่นยนต์และความกว้างของสายพานลําเลียงเท่านั้น
การสร้างและปิดผนึกกล่อง: สายการบรรจุหีบห่อรวมเครื่องสร้างกล่องอัตโนมัติที่ทางเข้าของโซนบรรจุภัณฑ์โมดูลโหลดหุ่นยนต์ที่หุ่นยนต์เดลต้าวางพิซซ่าลงในกล่องที่สร้างขึ้นและสถานีปิดผนึกกาวร้อนละลายที่เต้าเสียบ ระบบการพิมพ์และติดฉลากจะใช้ข้อมูลตัวแปร (รหัสแบทช์ วันหมดอายุ น้ําหนัก) ทันทีหลังจากการปิดผนึก ลําดับทั้งหมดตั้งแต่การเลือกพิซซ่าไปจนถึงกล่องปิดผนึกที่มีฉลากจะเสร็จสมบูรณ์ภายใน 8 วินาทีต่อหน่วยในสายการผลิตความจุสูง
ข้อควรพิจารณาในโซนเย็น: สายพิซซ่าแช่แข็งทํางานในเขตการผลิตที่มีอุณหภูมิต่ํา (โดยทั่วไปคือ 0°C ถึง 10°C โดยรอบ) หุ่นยนต์เดลต้าของ Hengjiang ระบุจาระบีอุณหภูมิต่ําสําหรับพื้นผิวแบริ่งทั้งหมดและขดลวดมอเตอร์ที่ปิดสนิทซึ่งได้รับการจัดอันดับสําหรับการทํางานที่ยั่งยืนในสภาพแวดล้อมห้องเย็น การจัดการการควบแน่นในตู้ไฟฟ้าใช้เครื่องทําความร้อนที่ควบคุมอุณหภูมิเพื่อป้องกันการสะสมของความชื้นระหว่างการเปลี่ยนอุณหภูมิ
การบูรณาการต้นน้ํา: สายการคัดแยกและบรรจุภัณฑ์พิซซ่าเชื่อมต่อโดยตรงกับ Hengjiang'sสายการผลิตพิซซ่าขึ้นรูปและเอาต์พุตอุโมงค์อบที่เกี่ยวข้อง สิ่งนี้ช่วยให้โครงการระบบอัตโนมัติของโรงงานพิซซ่าที่สมบูรณ์สามารถจัดหาได้จากซัพพลายเออร์รายเดียว ทําให้การจัดการโครงการ ความรับผิดชอบในการรับประกัน และการประสานงานบริการในระยะยาวง่ายขึ้น
สําหรับวิดีโอสาธิตการกําหนดค่าสายพิซซ่าทั้งสองที่ใช้งานอยู่ โปรดไปที่ส่วนวิดีโอหุ่นยนต์อบ.
Hengjiang Intelligent Technology Co., Ltd. เป็นผู้ผลิตแบบบูรณาการในแนวตั้ง: การออกแบบเครื่องกล การพัฒนาเซอร์โวไดรฟ์ ซอฟต์แวร์ควบคุมการเคลื่อนไหวของหุ่นยนต์ อัลกอริธึมการมองเห็นของเครื่อง และการรวมระบบทั้งหมดดําเนินการภายในองค์กร ซึ่งหมายความว่าไม่มีความเสี่ยงด้านความเข้ากันได้ระหว่างซัพพลายเออร์ในส่วนต่อประสานที่สําคัญระหว่างหุ่นยนต์ การมองเห็น และการควบคุม ซึ่งเป็นจุดล้มเหลวทั่วไปในระบบแบบบูรณาการของบุคคลที่สาม
อุปกรณ์ทั้งหมดผ่านการทดสอบการยอมรับจากโรงงาน (FAT) อย่างเข้มงวดที่โรงงานของ Hengjiang ก่อนจัดส่ง โดยจําลองสภาพการผลิตของลูกค้าด้วยผลิตภัณฑ์ที่เป็นตัวแทน การติดตั้งและการว่าจ้างดําเนินการโดยทีมเทคนิคของ Hengjiang เอง การสนับสนุนหลังการว่าจ้างรวมถึงการตรวจสอบระยะไกลผ่านแพลตฟอร์มการควบคุมที่เปิดใช้งาน IoT พร้อมการเข้าถึงบันทึกข้อผิดพลาด ข้อมูลวงจร และตัวชี้วัดประสิทธิภาพแบบเรียลไทม์ สําหรับคําอธิบายทั้งหมดของเฟรมเวิร์กการบริการ — รวมถึงโปรโตคอลการตรวจสอบอุปกรณ์ มาตรฐานการติดตั้ง และเงื่อนไขการรับประกัน — โปรดดูที่บริการและการสนับสนุนหน้า
Hengjiang ยังมีสายการผลิตเบเกอรี่ที่สมบูรณ์ซึ่งครอบคลุมหมวดหมู่ขนม ครัวซองต์ ทาร์ตไข่ โดนัท พิซซ่า และพาย เมื่อสายการคัดแยกและบรรจุภัณฑ์ด้วยหุ่นยนต์จับคู่กับสายการขึ้นรูปและอบ Hengjiang ผลลัพธ์ที่ได้คือเซลล์โรงงานอัจฉริยะอัตโนมัติเต็มรูปแบบพร้อมความรับผิดชอบทางเทคนิคเพียงจุดเดียว สํารวจแบบเต็มพอร์ตโฟลิโอสายการผลิตสําหรับตัวเลือกอุปกรณ์ต้นน้ํา หรือไปที่หน้าบริษัท Hexeon Groupสําหรับข้อมูลภูมิหลังของบริษัท กําลังการผลิต และวัฒนธรรม
สําหรับการสอบถามเฉพาะผลิตภัณฑ์ การอภิปรายเกี่ยวกับราคา หรือการจัดเตรียมการเยี่ยมชมโรงงาน ให้ใช้หน้าติดต่อเพื่อติดต่อทีมขายด้านเทคนิคของ Hengjiang โดยตรง