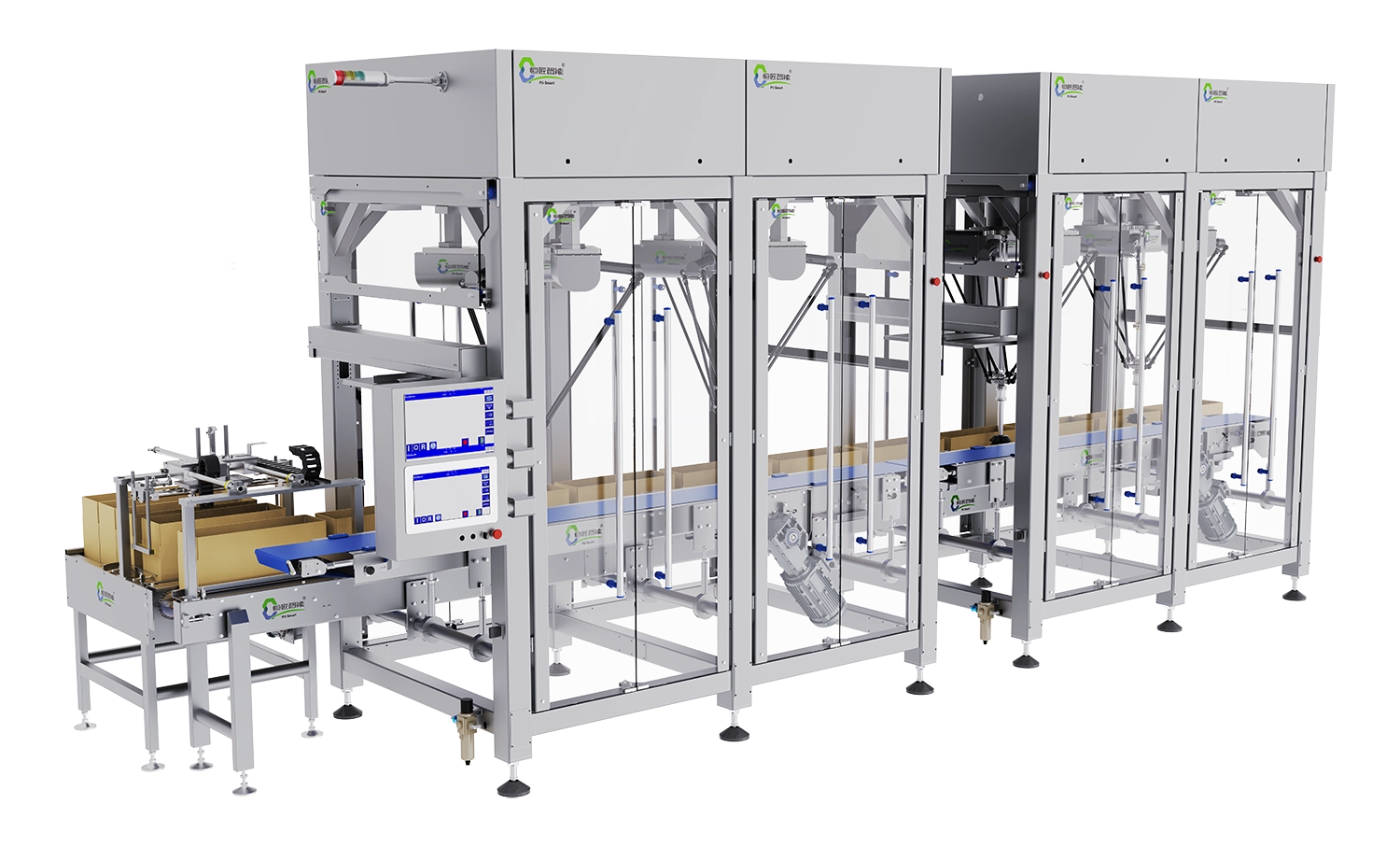
ระบบสายพานลําเลียงคัดแยกพิซซ่าและบรรจุภัณฑ์จะคัดแยกพิซซ่าแช่แข็งและใส่ลงในกล่องตามขั้นตอนต่อไปนี้:
1. การลําเลียงผลิตภัณฑ์: เชื่อมต่อกับสายพานลําเลียงที่เข้ามาโดยใช้การหมุนของสายพานเพื่อขนส่งผลิตภัณฑ์ไปยังตําแหน่งที่กําหนด
2. การวางตําแหน่งผลิตภัณฑ์: กล้องอุตสาหกรรมวางอยู่เหนือสายพานลําเลียงคัดแยกอาหารจะจับภาพเพื่อค้นหาผลิตภัณฑ์เมื่อมาถึง
3. การคัดแยกและการจัดเก็บผลิตภัณฑ์: หลังจากการวางตําแหน่งด้วยภาพสายพานลําเลียงคัดแยกจะถ่ายโอนผลิตภัณฑ์ใต้โครงรองรับหุ่นยนต์ หุ่นยนต์เดลต้าคู่ขนานสองตัวจับผลิตภัณฑ์ที่วางตําแหน่งไว้และวางลงในกล่องบนสายพานลําเลียงที่ซิงโครไนซ์ เมื่อกล่องเต็มไปด้วยผลิตภัณฑ์สามแถวโซ่ลําเลียงจะขับเคลื่อนแถบดันข้ามเพื่อเลื่อนกล่องเพื่อบรรจุเพิ่มเติม
4. การโหลดและการบรรจุกล่อง: สายพานลําเลียงแบบซิงโครไนซ์ขนส่งกล่องเปล่า จากนั้นหุ่นยนต์เดลต้าสองตัวจะหยิบผลิตภัณฑ์และใส่ลงในกล่อง หลังจากเติมแล้วกล่องจะเคลื่อนไปข้างหลังเพื่อบรรจุในภายหลัง
เวิร์กสเตชันนี้เหมาะอย่างยิ่งสําหรับการคัดแยกและบรรจุผลิตภัณฑ์แช่แข็งในอุตสาหกรรมอาหาร รวมถึงสายการบรรจุภายในสําหรับโดนัทแช่แข็ง เกี๊ยว ซาลาเปา และอื่นๆ นอกจากนี้ยังปรับให้เข้ากับยา อิเล็กทรอนิกส์ และผลิตภัณฑ์เคมีภัณฑ์ประจําวัน ประสิทธิภาพ ความยืดหยุ่น และความแม่นยําช่วยเพิ่มระบบอัตโนมัติของสายการผลิต เพิ่มประสิทธิภาพ ลดต้นทุน และปรับปรุงคุณภาพของผลิตภัณฑ์และความสามารถในการแข่งขันทางการตลาด
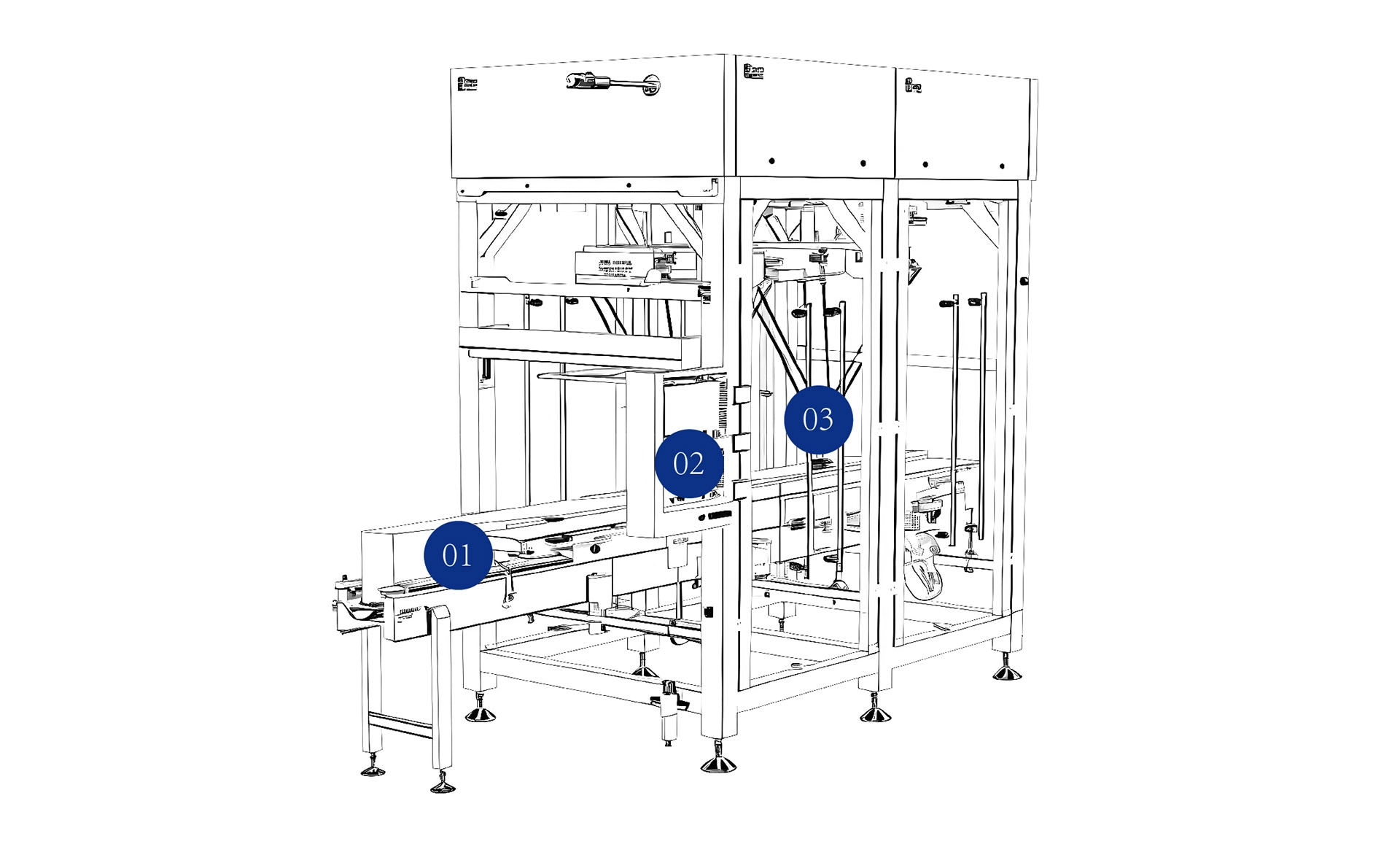

01 Buffer Docking & Feeding Alignment: วัสดุที่เข้ามาจะเข้าสู่เวิร์กสเตชันอย่างต่อเนื่องและต่อเนื่องผ่านโซ่ลําเลียง
02 ระบบปฏิบัติการที่เป็นกรรมสิทธิ์: ระบบปฏิสัมพันธ์ระหว่างมนุษย์กับเครื่องจักรหลายแพลตฟอร์ม

03 Vision Positioning & Accelerated Inspection: ระบบจดจําภาพจะระบุผลิตภัณฑ์ที่เข้ามา ทําให้หุ่นยนต์สามารถจัดเรียงและจัดตําแหน่งสิ่งของที่ผิดปกติบนสายพานลําเลียงสําหรับการประมวลผลปลายน้ํา

ระบบปฏิบัติการขั้นสูงเพื่อการผลิตที่มีประสิทธิภาพ

โหมดทําความสะอาดที่ง่ายและรวดเร็ว

การออกแบบขั้นสูงช่วยลดเวลาหยุดทํางานเพื่อลดต้นทุน
การใช้งานที่ใช้งานง่ายผ่านมือถือแท็บเล็ตพีซีและหน้าจอสัมผัสในตัว
ประสิทธิภาพอัจฉริยะเพื่อลดการใช้พลังงาน

•ระบบปฏิบัติการที่จดสิทธิบัตรเข้ากันได้สูงกับระบบการผลิตเพื่อให้แน่ใจว่ากําลังการผลิต รองรับสมาร์ทโฟนแท็บเล็ตคอมพิวเตอร์และโหมดการทํางานของหน้าจอสัมผัสเพื่อความสะดวกสูงสุดและการควบคุมการผลิต

•การใช้งานที่ใช้งานง่ายการออกแบบหน้าจอสัมผัสที่เป็นมิตรกับผู้เริ่มต้นเหมาะสําหรับบุคลากรกึ่งทักษะ

•การควบคุมที่แม่นยํา: ระบบควบคุมขั้นสูงช่วยให้มั่นใจได้ถึงเสถียรภาพในการทํางาน
| พารามิเตอร์ทางเทคนิค |
ขนาดอุปกรณ์: แรงดันไฟฟ้า: ความจุของแหล่งจ่ายไฟ: ความต้องการความดันอากาศ: อัตราการไหล: ความเร็วสายพานลําเลียง: |
4144 * 1743 * 3066 มม ไฟฟ้ากระแสสลับ 380V + 10-15% >215 กิโลวีเอ >0.6MPa (6 กก. / ซม.²) >2m³/นาที 430 มม. / วินาที |
| ข้อดีของผลิตภัณฑ์ |
การปฏิบัติตามข้อกําหนดด้านความปลอดภัยของอาหาร:ออกแบบมาเพื่อให้เป็นไปตามมาตรฐานความปลอดภัยระดับอาหาร โดยใช้สภาพแวดล้อมที่ปราศจากฝุ่นและสารหล่อลื่นที่ปลอดภัยต่ออาหารเพื่อสุขอนามัย ระบบอัตโนมัติสูง:การจัดการวัสดุที่แม่นยําช่วยลดต้นทุนของเสียและแรงงานโดยการกําจัดการดรอปเอาต์ โมดูลาร์ออกแบบ:โมดูลที่ปรับแต่งได้ตอบสนองความต้องการของหุ่นยนต์ที่หลากหลายปรับให้เข้ากับความต้องการในการผลิต การปรับตัวของสภาพแวดล้อมที่หนาวเย็น:รักษาประสิทธิภาพที่มั่นคงและมีประสิทธิภาพสูงในสภาวะเยือกแข็งสําหรับงานต่างๆ เช่น การจับ การวางซ้อน และการลําเลียง ความเก่งกาจ:ปรับปรุงการผลิตด้วยระบบอัตโนมัติแบบบูรณาการสําหรับการซ้อน ลําเลียง และถ่ายโอนผลิตภัณฑ์ได้อย่างยืดหยุ่น การป้องกันความปลอดภัย:การป้องกันในตัว รวมถึงราวกั้นและประตูนิรภัย ช่วยให้มั่นใจได้ถึงความปลอดภัยของผู้ปฏิบัติงาน ความเร็วสูงและความแม่นยํา:ให้การจับที่รวดเร็วและแม่นยําเพื่อเพิ่มประสิทธิภาพและคุณภาพของผลิตภัณฑ์ กริปเปอร์นิวเมติก: เอ็นเอฟเฟกต์ใช้กริปเปอร์นิวเมติกเพื่อการจับ/วางซ้อนที่เชื่อถือได้ พร้อมเครื่องมือที่เปลี่ยนได้สําหรับการจัดการอาหารที่หลากหลาย |
|
| สภาพแวดล้อมในการทํางาน |
ความสามารถในการรับน้ําหนักของพื้น อุณหภูมิโดยรอบ ความชื้นแวดล้อม การสั่นสะเทือน การรบกวน |
โหลดเฉลี่ย ≥500 กก./ตร.ม. 5-40 องศาเซลเซียส ไม่เกิน 75% ไม่มีน้ําค้างแข็ง ไม่มีน้ําค้าง ≤0.5 กรัม ปราศจากการรบกวนทางวิทยุ/แม่เหล็กไฟฟ้าที่รุนแรง |